
1.自动操舵系统基本要求
在给定的航向上,为使船舶以足够的精度安全航行自动舵必须满足以下的基本要求:
(1)自动操舵性能良好
当船舶偏离给定航向一定角度(超过系统灵敏度所整定的角度)时,系统应立即工作,使舵叶偏转一定的角度,这个初始转舵角叫做一次偏舵角。
初始舵角应有适当的数值,如果过大会降低船舶航行速度,过小则产生的转船力矩不足以使船舶回到正航向来。
如果给出初始偏航舵角后船舶仍然偏离预定航向,自动舵必须保证有附加舵角(二次偏舵角)。
上述要求,实质上是选择比例舵的比例系数问题。
此外,在自动舵中还应具有微分和积分(或压舵)校正环节,其目的是使自动舵在调节过程中具有良好的动态性能和静态性能。
(2)具有必要的调节装置
为了使同一型号的自动舵装置能够适用于不同的排水量、装载量、航速及舵机拖动装置的船舶,并能适应各种天气、海况,在自动舵系统中应有如下的基本调节装置:
①灵敏度调节(俗称天气调节)。
灵敏度是指系统开始投入工作时的最小偏航角。
它视天气、海况而定。
在风平浪静时,灵敏度要调高一些;
在大风大浪下,应适当降低自动舵的灵敏度,以减少动舵次数。
②舵角比例调节。
偏舵角与偏航角之比(即K1的数值)的大小,直接影响自动舵给出的一次偏舵角和二次偏舵角的数值,因此要根据船型、装载、航速等情况调节舵角比例,以获得一个合适的舵角比。
③反舵角调节。
偏航中的船舶在自动舵的作用下回复到正航向时,舵叶应先回到艏艉线上,然后再向另一舷偏过一个小角度,以防止船舶因惯性力而继续向另一侧偏航,这个预先的偏舵角称之为反舵角(又称制动舵角,稳舵角,纠偏舵角),应根据船型、装载、天气等情况进行调节。
反舵角可以由微分环节来实现反舵角调节主要调节微分系数K2,又称微分调节。
④压舵调节。
为了纠正船舶由于受到单侧风浪、水流等因素影响而引起的不对称偏航单侧偏航,自动舵中应当设有自动压舵/人工压舵的调节装置。
在具有航向积分环节的自动舵中,则设有积分调节,主要调节积分系数K3。
⑤航向调节。
应能保证在自动舵不间断工作的情况下,通过航向调节来改变船舶的给定航向,使船舶在新的预定航向上航行。
航向的修正也可以通过此调整装置进行。
各种自动舵系统,由于自动操舵仪使用元件不同,调整方法可能有差别,但它们的作用相同。
(3)应设有随动、单动等操舵设备在船舶进出港、或遭到紧急情况以及自动操舵失灵,能立刻转换为其他形式的操舵,如随动操舵或单动(应急)操舵,以保证船舶航行的可靠性。
此外,自动舵还应设有双电源(两路供电),双机组换转等装置。
2.自动操舵系统的工作原理
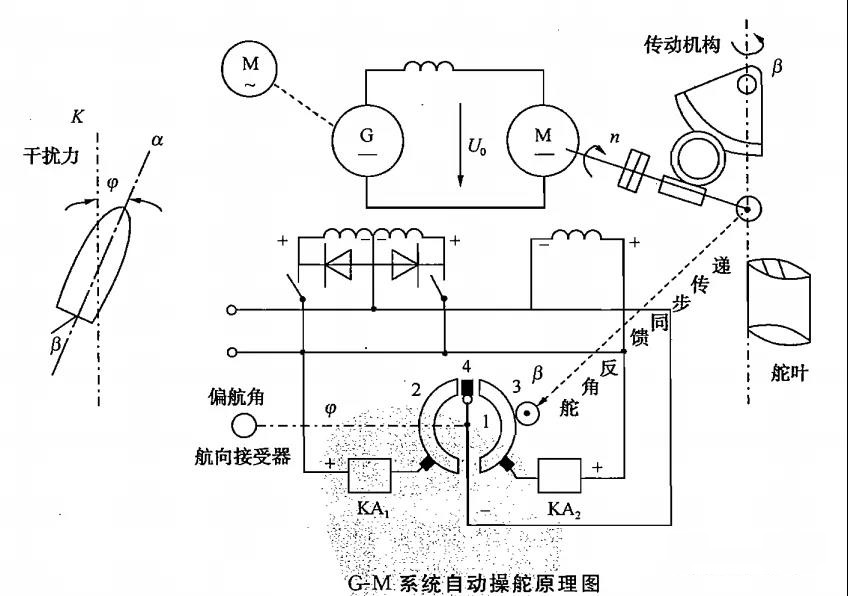
上图为电动一机械自动操舵系统的原理简图。
图中,交流三相异步电动机、直流发电机及直流电动机构成了M系统,直流电动机M为执行电动机。
操舵开关为为两半圆环2和3,它们被一绝缘块4所分离。
两半圆环与舵角反馈装置机械相连。
滚动触头(滚轮)1与航向接收器机械相连。
航向接收器与罗经发讯器是同步传递。
当船舶沿给定航向K航行,舵叶在艏艉线上,如图示,滚轮1恰好与绝缘块4接触,两个继电器KA1、KA线圈都不通电,其常开触头都开启,直流发电机G磁场电流为零,输出电压U为零,直流电动机M静止不动。
当船舶偏离预定航向时,通过陀螺罗经发讯器使航向接收器也转动同一个角度,滚轮1在两个半圆环上滑动,滚轮1与左或右半圆环接触,使接触器KA1(或KA2)线圈通电动作,使电动机正转(或反转),拖动舵叶向某一舷偏转(视船舶偏离预定航向的方向而定),在舵的作用下使船舶向原预定航向返回。
下面分5个阶段(其实是连续的)说明船舶因外界干扰而偏转离正航向K后是如何通过自动舵的作用又重返正航向的。
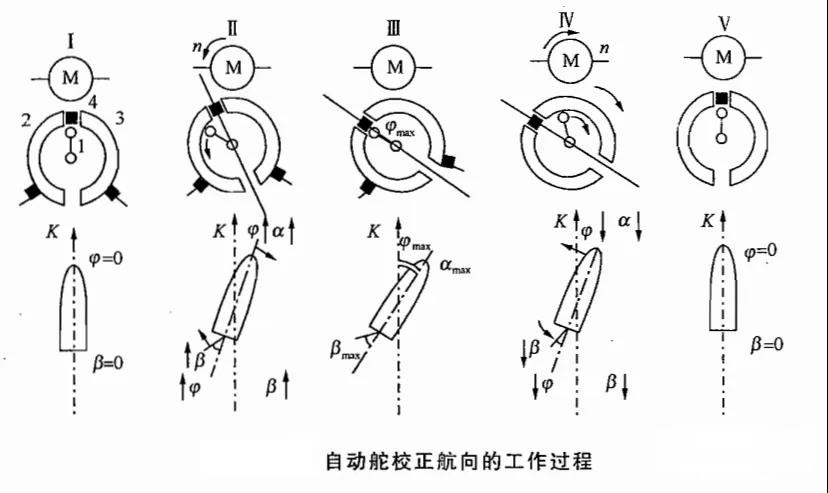
第一个阶段(I):
船舶沿正航向K航行,滚轮1恰好与绝缘块4接触,电动机不转动,舵叶在艏艉线上,艏艉线与正航向重合,偏航角φ、偏舵角B都为零。
第二阶段(Ⅱ):
假设由于受到风、流等外界影响,船舶向右偏航,首先航向发送器使自动操舵仪上的航向接收器(即罗经复示器)同步转动某一角度,并带动滚轮T向左偏转,与左边导电半圆环2接触,电动机转动,舵叶向左舷偏转,通过舵角反馈同步传递结构,使两个导电环以相同的方向向左作追随滚轮的运动。
这一阶段由于外界干扰的持续存在,开始偏舵时偏舵角很小,舵效不明显,所以船舶继续向右偏航(增加),导电环继续作追随滚轮的运动。
第三阶段(Ⅲ):
由于较强的舵效,使船舶偏航到某一最大偏航角m而停止偏航,导电环追上滚轮,绝缘块与滚轮接触,电动机停转,偏舵角也达到最大值max
第四阶段(Ⅳ):
船舶在左舵作用下,向正航向K回转,偏航角从max逐渐减小,又通过航向发送器作用,使滚轮开始与右边导电环3接触,电动机向右转,舵叶朝着艏艉方向偏转(减小),导电环向右作追随滚轮的运动。
第五阶段(V):
船舶回到正航向K上,导电环正好追上滚轮,使滚轮处于绝缘块上,电动机停转,舵叶位于艏艉线上。
上述连续的5个阶段船舶偏离正航向又重返正航向的航迹如图所示。
可见采用这一系统进行操舵能够使船舶在偏航后有自动恢复正航向的能力。
这就是电动一机械自动操舵系统的基本工作原理。
免责申明:本文来自船舶讲武堂,仅代表作者观点,不代表中国海员之家立场。其真实性及原创性未能得到中国海员之家证实,在此感谢原作者的辛苦创作,如转载涉及版权等问题,请作者与我们联系,我们将在第一时间处理,谢谢!联系邮箱:cnisu@54seaman.com